Contrôleur de moteur 12V 7A
Liens pour télécharger l'image tinypilot avec la version stable 0.56 de Pypilot
Calculateur CR et du HAT HR avec récepteur de télécommande 433MHz
Calculateur CS et du HAT HS sans récepteur de télécommande radio
Contrôleur de moteur 12V 7A
Contrôleur de moteur 12-24V 10A
Contrôleur de moteur 12-24V 15A
Contrôleur de moteur 12-24V 30A
Convertisseur isolé USB-NMEA0183
Procédures pour réglage de Pypilot, sauvegarde et récupération des réglages et de l'étalonnage
Pypilot - Profils, réglage des gains et des paramètres du contrôleur de moteur
Sauvegarde des réglages et de l'étalonnage
Pypilot - Profils, réglage des gains et des paramètres du contrôleur de moteur
Sauvegarde des réglages et de l'étalonnage
Liens pour télécharger l'image tinypilot avec la version stable 0.56 de Pypilot
- Image de Sean pour Pi Zero (tinypilot_2024_07_17.img.xz) avec une version système tinycore qui fonctionne avec RPI Pi 0, 1, 2, 3 ou 5 (incompatible avec les Pi Zero 2W et 3+)
- Image Navitop pour Pi Zero 2W (tinypilot13-20260227.zip) avec l'image de Stellian (tinycore13) complétée avec les jeux de paramètres et gains de Sean
Calculateur CR et du HAT HR avec récepteur de télécommande 433MHz
Calculateur CS et du HAT HS sans récepteur de télécommande radio
Contrôleur de moteur 12V 7A
Contrôleur de moteur 12-24V 10A
Contrôleur de moteur 12-24V 15A
Contrôleur de moteur 12-24V 30A
Convertisseur isolé USB-NMEA0183
Schéma de calculateur Pypilot Tinypilot à faire soi-même
Ce schéma montre comment constituer soi même un calculateur de pilote automatique Pypilot. La configuration minimale nécessaire est un Pi Zero W connecté à un module IMU et à un contrôleur de moteur. Le schéma montre aussi comment y raccorder en plus un afficheur LCD, une interface NMEA ou un clavier.
Ce schéma montre comment constituer soi même un calculateur de pilote automatique Pypilot. La configuration minimale nécessaire est un Pi Zero W connecté à un module IMU et à un contrôleur de moteur. Le schéma montre aussi comment y raccorder en plus un afficheur LCD, une interface NMEA ou un clavier.
Adaptation des contrôleurs de moteur Pypilot à des actionneurs particuliers
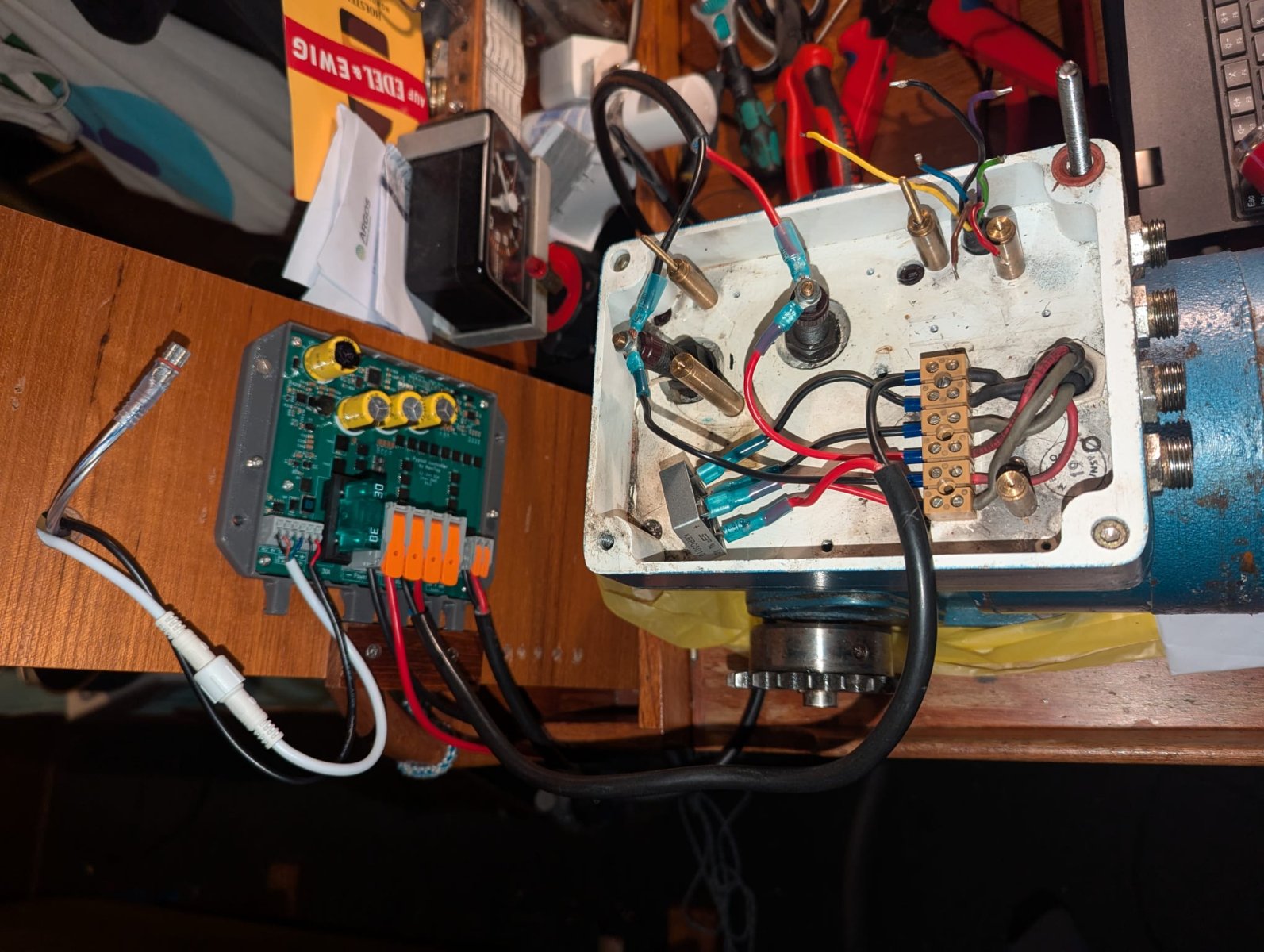
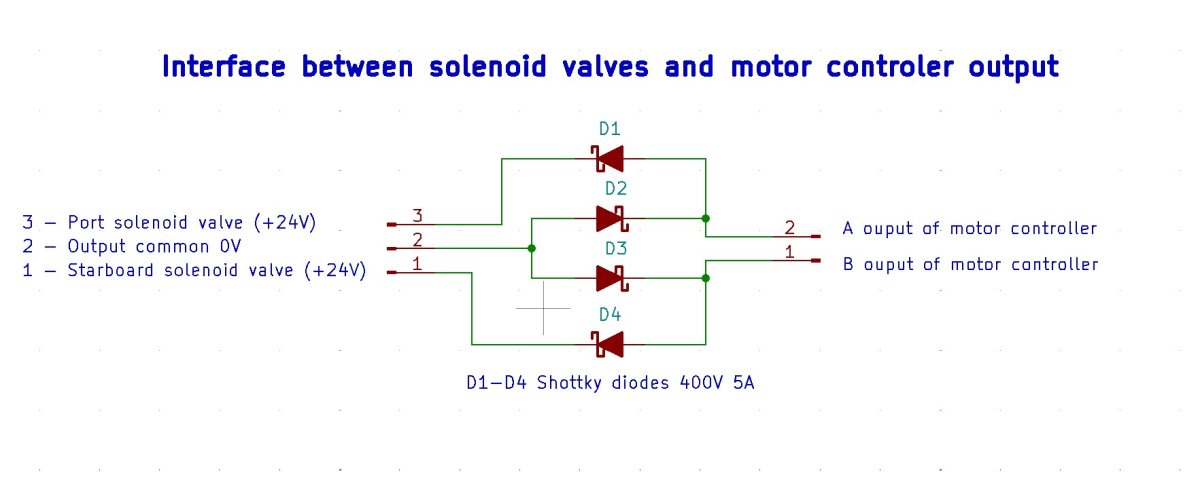
Adaptation du contrôleur 30A à un actionneur NECO 17DR8 or 35DR8
Photo de l'adaptation à l'actionneur NECO
Photo de l'adaptation à l'actionneur NECO
{kind=link}
{kind=link}
Fichiers STL pour impression 3D (ASA or PETG)
12V 7A boîtier du contrôleur de moteur
12-24V 10A boîtier du contrôleur de moteur
12-24V 15A boîtier du contrôleur de moteur
12-24V 30A boîtier du contrôleur de moteur
12V 7A boîtier du contrôleur de moteur
12-24V 10A boîtier du contrôleur de moteur
12-24V 15A boîtier du contrôleur de moteur
12-24V 30A boîtier du contrôleur de moteur
Protection télécommande étanche 8 boutons avec deux RT4s
Support pour deux télécommandes avec protection
Support de télécommande RT4 pour vérin linéaire Autohelm ou Raymarine
Support de télécommande RT4 pour vérin linéaire chinois
Protection du moteur pour vérin linéaire chinois
Support pour deux télécommandes avec protection
Support de télécommande RT4 pour vérin linéaire Autohelm ou Raymarine
Support de télécommande RT4 pour vérin linéaire chinois
Protection du moteur pour vérin linéaire chinois
Autres documents intéressants
Site officiel Pypilot de Sean d'Epagnier
Manuel Pypilot (pdf en français) Ce manuel initié par Sean d'Epagnier, le concepteur de Pypilot, se concentre principalement sur l'utilisation de pypilot avec l'image tinypilot et un Pi Zero dédié exclusivement au pilotage automatique pour un fonctionnement stable et économe en énergie, avec les produits de la boutique Pypilot. Cette configuration, similaire à celle proposée par la boutique Navitop, offre néanmoins de nombreuses options de contrôle et de communication avec les applications des suites logicielles exécutées sur un Pi 4 ou 5 distinct.
Pypilot Workbook Ce manuel est essentiel si vous souhaitez exécuter pypilot avec Openplotter ou BBN et si vous souhaitez découvrir tinypilot en profondeur. Il vous aide à comprendre les interactions entre les applications ainsi qu'à configurer le Pi, pypilot et ces applications.
Manuel Pypilot (pdf en français) Ce manuel initié par Sean d'Epagnier, le concepteur de Pypilot, se concentre principalement sur l'utilisation de pypilot avec l'image tinypilot et un Pi Zero dédié exclusivement au pilotage automatique pour un fonctionnement stable et économe en énergie, avec les produits de la boutique Pypilot. Cette configuration, similaire à celle proposée par la boutique Navitop, offre néanmoins de nombreuses options de contrôle et de communication avec les applications des suites logicielles exécutées sur un Pi 4 ou 5 distinct.
Pypilot Workbook Ce manuel est essentiel si vous souhaitez exécuter pypilot avec Openplotter ou BBN et si vous souhaitez découvrir tinypilot en profondeur. Il vous aide à comprendre les interactions entre les applications ainsi qu'à configurer le Pi, pypilot et ces applications.